The pioneering cell biologist Michael Abercrombie first described the process of contact inhibition of locomotion more than 50 years ago when migrating fibroblasts were observed to rapidly change direction and migrate away upon collision. Since then, we have gleaned little understanding of how contact inhibition is regulated and only lately observed its occurrence in vivo. We recently revealed that Drosophila macrophages (haemocytes) require contact inhibition for their uniform embryonic dispersal. Here, to investigate the role that contact inhibition plays in the patterning of haemocyte movements, we have mathematically analysed and simulated their contact repulsion dynamics. Our data reveal that the final pattern of haemocyte distribution, and the details and timing of its formation, can be explained by contact inhibition dynamics within the geometry of the Drosophila embryo. This has implications for morphogenesis in general as it suggests that patterns can emerge, irrespective of external cues, when cells interact through simple rules of contact repulsion.
INTRODUCTION
Drosophila haemocytes are highly migratory cells that are readily amenable to analysis of their developmental movements in vivo (Wood et al., 2006; Stramer et al., 2008; Siekhaus et al., 2010; Stramer et al., 2010). They are initially derived at stage 10-11 of Drosophila development and subsequently disperse evenly throughout the embryo, taking stereotypical migratory routes. One of these routes is along the ventral surface of the embryo, where a three-line cellular pattern is formed (Fig. 1A). Previously, we revealed that this uniform dispersal is driven, at least in part, by contact inhibition (Stramer et al., 2010). However, we still do not know the role that contact inhibition might be playing in the emergence of this pattern, and whether an external cue is required. We have therefore set out to model this process mathematically to determine whether contact inhibition dynamics can fully explain the pattern generation.
MATERIALS AND METHODS
Imaging
Srp-Gal4 was recombined with UAS-redStinger and UAS-ClipGFP to label the nucleus and microtubules, respectively, and mounted as previously described (Wood et al., 2006). Time-lapse images were collected on a Leica SP5 or a PerkinElmer UltraVIEW spinning disk microscope and cells tracked with Volocity (PerkinElmer) or Imaris (Bitplane) software. For Cyclin A overexpression, Srp-Gal4, UAS-ClipGFP, UAS-redStinger was crossed with UAS-CycA (Bloomington Stock Center). To examine Collagen IV deposition, the GFP enhancer trap line Viking-GFP (Morin et al., 2001) was imaged on the ventral surface at stages 14 and 16.
Domain analysis
For domain analysis, UAS-GFPmoesin (Dutta et al., 2002) or UAS-LifeActGFP (Zanet et al., 2012) was driven in haemocytes to label actin, and cells were visualised for 2 hours at 1-minute intervals. The time-lapse series was then thresholded within ImageJ (NIH) and flattened with an average intensity projection. A contour plot was generated using the ImageJ contour plotter plug-in. For analysis of moving domains, a 2-hour movie was generated and a map created in a 40-minute walking average using the walking average ImageJ plug-in.
Correlating migration to segments
To quantify the percentage of tracks that crossed segment boundaries, ∼2-hour time-lapse movies were acquired of nuclei-labelled haemocytes along with brightfield images, which allowed us to visualise segments. Real segment maps were overlaid onto simulated tracks to approximate segment crossing in computer simulations. The simulation was run for 60 minutes, and in reality tracks of 50-70 minutes were used for subsequent analysis.
Simulation
For details of the model, see supplementary material Appendix S1 and Fig. S4.
Tracking and segmentation methods
To track both the nuclear movement and the cell body, segmentation of nuclear and tubulin data was performed using a graph theoretic algorithm (Boykov and Jolly, 2001). The algorithm was initialised with a user-selected threshold to identify areas of interest. To compute the solution, the max-flow was found, using a variant of Dinic’s algorithm, before the solution was transformed into the min-cut boundaries. The centres of the extracted boundaries were calculated by finding the largest inscribing circle that could fit within the boundary. This method was used because simpler methods, such as calculating centroids, could be altered by the extension and retraction of structures such as lamellipodia.
RESULTS AND DISCUSSION
Automatic tracking of colliding and non-colliding haemocytes during their developmental dispersal
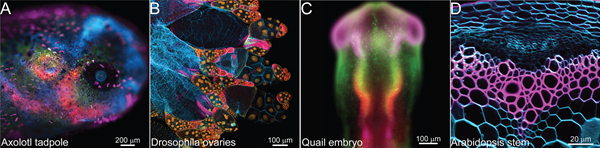
We have focused on the movement of haemocytes along the ventral surface of the Drosophila embryo as they spread out within an acellular space beneath the overlying epithelium. This is a thin and approximately flat space, which has allowed us to model haemocyte movement in two dimensions (Stramer et al., 2010). To enhance the analysis, we have generated fly lines expressing a red nuclear marker along with GFP-labelled microtubules. This allowed us to automatically track haemocytes using the nucleus as a fiduciary marker (supplementary material Movie 1), while at the same time using microtubule alignment as a visual marker of a collision event as previously described (Fig. 1B; supplementary material Movie 2) (Stramer et al., 2010). We also compared this nuclear tracking method with tracking the cell centroid position. Comparison of these two methods revealed that nuclear and cell body tracks were nearly identical (supplementary material Fig. S1A) even after directional changes in response to collision events (supplementary material Movie 3), showing that the haemocyte nucleus does not move independently during changes in cell polarity as has been reported in other cell types in vitro (Gomes et al., 2005). Analysis of acceleration vectors during contact inhibition revealed a significant negative acceleration coincident with the time of collision, justifying our use of microtubule-microtubule contact as a definition of a collision (Fig. 1C,D).
![In vivo tracking of Drosophila haemocytes during contact inhibition. (A) A red fluorescent nuclear marker and a GFP microtubule label (green) were driven specifically in Drosophila haemocytes to observe acquisition of the three-line pattern (arrows). (B) Stills from a time-lapse movie of a haemocyte collision pair. Nuclei were tracked and the collision was defined by microtubule alignment (white arrowhead). (C) Sketch of colliding haemocytes at the moment of microtubule alignment (time t), illustrating how the acceleration vector at is calculated as its change in velocity vt–vt–1. Note that all vectors were oriented so that the cell on the right is in horizontal alignment with that on the left (dashed grey line). (D) Five samples of acceleration vectors surrounding a collision from t–1 to t+3 minutes. The x-components of the accelerations showed no significant bias to left or right except at the collision time t, when there was a highly significant bias away from the target cell [two-tailed t-tests: df=53, t-statistic=–1.68, –5.33, –0.69, 1.08, –1.34, respectively; P>0.05 except in the second case (collision time) when P<<0.001]. Scale bars: 10 μm.](https://cob.silverchair-cdn.com/cob/content_public/journal/dev/139/24/10.1242_dev.082248/3/m_dev082248f1.jpeg?Expires=1716302629&Signature=sQyRWys8K1cns39090ZzU4PZ8RY63e1T9UcbmG1KNAi7FkNznjG76SyUo-2af6PuFSI3WO6M98m-9HuTIqHBkptP-gKmck2EYideq1RIgZL5F1JI5LfsASSOkftOSaX3-ylmVd2WH~8hmWchh9voCmZfnW~8EMVTxI~Wwbz~oNtyCq0SoB60KVGwupr-yGixf2U6WSIESAkzSNeYhTvHmIF2wwxdyBz0~myTp3TonzI~tlycaqH0IzRu6o7E9rQa-dh8H57WrBnKZDTGviLBTWBRqttRHr4-9ZWC4Wqeujhsv6DqJ0J3opDX8-CJEUvMGXu9Ovx2~mdboyWJGks~2A__&Key-Pair-Id=APKAIE5G5CRDK6RD3PGA)
In vivo tracking of Drosophila haemocytes during contact inhibition. (A) A red fluorescent nuclear marker and a GFP microtubule label (green) were driven specifically in Drosophila haemocytes to observe acquisition of the three-line pattern (arrows). (B) Stills from a time-lapse movie of a haemocyte collision pair. Nuclei were tracked and the collision was defined by microtubule alignment (white arrowhead). (C) Sketch of colliding haemocytes at the moment of microtubule alignment (time t), illustrating how the acceleration vector at is calculated as its change in velocity vt–vt–1. Note that all vectors were oriented so that the cell on the right is in horizontal alignment with that on the left (dashed grey line). (D) Five samples of acceleration vectors surrounding a collision from t–1 to t+3 minutes. The x-components of the accelerations showed no significant bias to left or right except at the collision time t, when there was a highly significant bias away from the target cell [two-tailed t-tests: df=53, t-statistic=–1.68, –5.33, –0.69, 1.08, –1.34, respectively; P>0.05 except in the second case (collision time) when P<<0.001]. Scale bars: 10 μm.
In vivo tracking of Drosophila haemocytes during contact inhibition. (A) A red fluorescent nuclear marker and a GFP microtubule label (green) were driven specifically in Drosophila haemocytes to observe acquisition of the three-line pattern (arrows). (B) Stills from a time-lapse movie of a haemocyte collision pair. Nuclei were tracked and the collision was defined by microtubule alignment (white arrowhead). (C) Sketch of colliding haemocytes at the moment of microtubule alignment (time t), illustrating how the acceleration vector at is calculated as its change in velocity vt–vt–1. Note that all vectors were oriented so that the cell on the right is in horizontal alignment with that on the left (dashed grey line). (D) Five samples of acceleration vectors surrounding a collision from t–1 to t+3 minutes. The x-components of the accelerations showed no significant bias to left or right except at the collision time t, when there was a highly significant bias away from the target cell [two-tailed t-tests: df=53, t-statistic=–1.68, –5.33, –0.69, 1.08, –1.34, respectively; P>0.05 except in the second case (collision time) when P<<0.001]. Scale bars: 10 μm.
Haemocytes initially migrate down the ventral midline above the nerve cord. Subsequently, the cells spread laterally to adopt a three-line pattern along the ventral surface (Fig. 1A), which has been hypothesised to require an external cue (Wood et al., 2006). The lateral boundary for haemocytes within this ventral space is a dynamically changing border created by other haemocytes migrating within an underlying plane (supplementary material Movie 4). Cells at the boundary occasionally change planes; however, this only occurs rarely, when they can do so without colliding with another cell. For the remainder of development, haemocytes continue to migrate within this semi-enclosed two-dimensional space and yet the population maintains a uniform distribution and a three-line pattern (supplementary material Movie 5).
Mathematical modelling of non-colliding haemocyte motility
We first sampled the behaviour of freely moving haemocytes. Non-colliding haemocytes were tracked at 1-minute intervals for a total of 6 minutes. This time span was chosen to maximise the sample size, as cells are highly constrained and do not run freely for long before colliding. The speed (in actuality the mean magnitude of the 1-minute displacement) of these freely moving cells was 2.1±1.4 μm min–1 (mean ± s.d.), which was slightly faster than the overall mean speed of haemocytes in the embryo (1.8±0.05 μm min–1), suggesting that motility is decreased by frequent collisions. We extracted 50 pairs of consecutive 1-minute velocity vectors from the sample for fitting the free motility model.

Fig. 2A,B explains how the two parameters of the model, ϕ (persistence) andσ (noise), were estimated from the sample data of velocity pairs vt–1 and vt. A justification for adopting this simple model was thatσ was not very different when measured along or across the direction of vt–1. Using these estimates, we ran the model as a simulation with an initial velocity of zero and found that the simulated cell speed reached a constant mean value (i.e. the time series became stationary) after a few minutes (supplementary material Fig. S1B). We found that this mean speed and its variation from several simulations (2.3±1.2 μm min–1) closely matched those of the actual non-colliding haemocytes (2.1±1.4 μm min–1), further justifying the choice of model (supplementary material Fig. S1C).
![Mathematical modelling of non-colliding and colliding haemocyte motility. (A) Illustration of the successive velocities vt–1 and vt (black vectors) in the free motility model, showing how the dark grey vectors ϕvt–1 andσnt sum together to give vt in each iteration. Sinceσnt is a random noise vector, the cloud of grey points shows a sample of other possible end points for vt. (B) Sample of vt data from non-colliding haemocyte tracks where each pair of successive vectors (vt–1, vt) has been oriented so that vt–1 points to the right. Taking expectations of the x-components we get E[vxt]=ϕE[vxt–1]+σE[nxt]. Since we know that E[nxt]=0, the estimate of ϕ becomes ϕestimate=mean[vxt]/mean[vxt–1] and we obtained a value of 0.73. The two estimates ofσ are given by:σxestimate=s.d.[vxt–ϕestimate vxt–1] andσyestimate=s.d.[vyt]; these estimates, 1.44 and 1.06, were not significantly different at the 1% level [two-sided Fisher’s variance ratio test: variance ratio=1.86; df=(49,49), 0.05>P>0.01] and the mean of the two estimates (1.25) was used for simulations. (C) Illustration of the successive velocities vt–1 and vt (black vectors) in the collision model showing how the dark grey vectors ψrt, ϕvt–1 andσnt sum together to give vt in each iteration. (D) vt data from multiple collisions where each pair of vectors (vt–1,vt) has been oriented so that vt–1 points to the right. We first took expectations of the y-components: E[vyt]=ψE[ryt]+ϕE[vyt–1]+σE[nyt]. Since all aspects of the motility were expected to be symmetrical about the x-axis, these terms would normally vanish; however, we have biased the data by flipping some collisions about the x-axis so that all target cells (grey arrows) lie to the right of the oncoming cell. This resulted in two terms vanishing, leaving E[vyt]=ψE[ryt], which enabled us to estimate ψ as mean[vyt]/mean[ryt]. The estimated value of ψ (1.25) was next used to calculate new vectors, vt–ψestimatert, which have the influence of the direction of the target cell removed. We used these modified vectors to estimate ϕ andσ by the methods used for the free motility model. We obtained an estimate for ϕ of 0.51, and the two estimates forσ (1.73 and 1.24) were again not significantly different at the 1% level [two-sided Fisher’s variance ratio test: variance ratio=1.94; df=(52,52), 0.05>P>0.01].](https://cob.silverchair-cdn.com/cob/content_public/journal/dev/139/24/10.1242_dev.082248/3/m_dev082248f2.jpeg?Expires=1716302629&Signature=k2dlArs06EjTBLLwBOj5e2QYdR6ftPQIa3Ywo1vX~52TVOSNPxiyEoWLshajNvOl1HYSvaWFh7StM1CoNRiGdx~s~sjw2rtUGfvGzAvJpOZMw~8Cem88XYljHnq6jBk~4kngDqqGLFt1ok8OtAf0hSLJn52P8mRADaWxuJ3wRHMbiC-Jh3tSfZflOylm08p9HNeonJs-xI-pbstiZZP1jXJwsPaECorbIQTdkba4GKR-yuQp-QnWNvCTEhrPF18fvoj85x-KXLtqInw78oYqN71Yf63I6WMyzxTlXUqxsLchYbX8lph1G2mt8OWcxoDBR2ZDZAnEBWJXIHWKwxVMwg__&Key-Pair-Id=APKAIE5G5CRDK6RD3PGA)
Mathematical modelling of non-colliding and colliding haemocyte motility. (A) Illustration of the successive velocities vt–1 and vt (black vectors) in the free motility model, showing how the dark grey vectors ϕvt–1 andσnt sum together to give vt in each iteration. Sinceσnt is a random noise vector, the cloud of grey points shows a sample of other possible end points for vt. (B) Sample of vt data from non-colliding haemocyte tracks where each pair of successive vectors (vt–1, vt) has been oriented so that vt–1 points to the right. Taking expectations of the x-components we get E[vxt]=ϕE[vxt–1]+σE[nxt]. Since we know that E[nxt]=0, the estimate of ϕ becomes ϕestimate=mean[vxt]/mean[vxt–1] and we obtained a value of 0.73. The two estimates ofσ are given by:σxestimate=s.d.[vxt–ϕestimate vxt–1] andσyestimate=s.d.[vyt]; these estimates, 1.44 and 1.06, were not significantly different at the 1% level [two-sided Fisher’s variance ratio test: variance ratio=1.86; df=(49,49), 0.05>P>0.01] and the mean of the two estimates (1.25) was used for simulations. (C) Illustration of the successive velocities vt–1 and vt (black vectors) in the collision model showing how the dark grey vectors ψrt, ϕvt–1 andσnt sum together to give vt in each iteration. (D) vt data from multiple collisions where each pair of vectors (vt–1,vt) has been oriented so that vt–1 points to the right. We first took expectations of the y-components: E[vyt]=ψE[ryt]+ϕE[vyt–1]+σE[nyt]. Since all aspects of the motility were expected to be symmetrical about the x-axis, these terms would normally vanish; however, we have biased the data by flipping some collisions about the x-axis so that all target cells (grey arrows) lie to the right of the oncoming cell. This resulted in two terms vanishing, leaving E[vyt]=ψE[ryt], which enabled us to estimate ψ as mean[vyt]/mean[ryt]. The estimated value of ψ (1.25) was next used to calculate new vectors, vt–ψestimatert, which have the influence of the direction of the target cell removed. We used these modified vectors to estimate ϕ andσ by the methods used for the free motility model. We obtained an estimate for ϕ of 0.51, and the two estimates forσ (1.73 and 1.24) were again not significantly different at the 1% level [two-sided Fisher’s variance ratio test: variance ratio=1.94; df=(52,52), 0.05>P>0.01].
Mathematical modelling of non-colliding and colliding haemocyte motility. (A) Illustration of the successive velocities vt–1 and vt (black vectors) in the free motility model, showing how the dark grey vectors ϕvt–1 andσnt sum together to give vt in each iteration. Sinceσnt is a random noise vector, the cloud of grey points shows a sample of other possible end points for vt. (B) Sample of vt data from non-colliding haemocyte tracks where each pair of successive vectors (vt–1, vt) has been oriented so that vt–1 points to the right. Taking expectations of the x-components we get E[vxt]=ϕE[vxt–1]+σE[nxt]. Since we know that E[nxt]=0, the estimate of ϕ becomes ϕestimate=mean[vxt]/mean[vxt–1] and we obtained a value of 0.73. The two estimates ofσ are given by:σxestimate=s.d.[vxt–ϕestimate vxt–1] andσyestimate=s.d.[vyt]; these estimates, 1.44 and 1.06, were not significantly different at the 1% level [two-sided Fisher’s variance ratio test: variance ratio=1.86; df=(49,49), 0.05>P>0.01] and the mean of the two estimates (1.25) was used for simulations. (C) Illustration of the successive velocities vt–1 and vt (black vectors) in the collision model showing how the dark grey vectors ψrt, ϕvt–1 andσnt sum together to give vt in each iteration. (D) vt data from multiple collisions where each pair of vectors (vt–1,vt) has been oriented so that vt–1 points to the right. We first took expectations of the y-components: E[vyt]=ψE[ryt]+ϕE[vyt–1]+σE[nyt]. Since all aspects of the motility were expected to be symmetrical about the x-axis, these terms would normally vanish; however, we have biased the data by flipping some collisions about the x-axis so that all target cells (grey arrows) lie to the right of the oncoming cell. This resulted in two terms vanishing, leaving E[vyt]=ψE[ryt], which enabled us to estimate ψ as mean[vyt]/mean[ryt]. The estimated value of ψ (1.25) was next used to calculate new vectors, vt–ψestimatert, which have the influence of the direction of the target cell removed. We used these modified vectors to estimate ϕ andσ by the methods used for the free motility model. We obtained an estimate for ϕ of 0.51, and the two estimates forσ (1.73 and 1.24) were again not significantly different at the 1% level [two-sided Fisher’s variance ratio test: variance ratio=1.94; df=(52,52), 0.05>P>0.01].
Mathematical modelling of haemocytes undergoing contact inhibition
In contrast to free migrations, collisions are discrete events and cannot be modelled by a continuous stochastic process, so instead of the time variable t used in the free model we use a fixed t to denote the time of collision. Data were gathered by tracking 27 pairs of colliding cells for 6 minutes (t–2 to t+4), making sure that the two cells collided only with each other during the time period; for comparison, freely running cells were tracked for an identical time. The average distance between the two cell positions at time t was remarkably constant at 30.0±5.2 μm. The mean speed of these 54 cells over the 4-minute period after collision (2.03±1.4 μm min–1) did not differ substantially from that of their freely moving counterparts. Nevertheless, we found a slight decrease in speed at the time of collision when tracks were analysed with better temporal resolution (15-second intervals) (supplementary material Fig. S1D). In comparison to these singly colliding cells, the overall mean speed of haemocytes in the embryo at around the same time period was lower (1.8 μm min–1). The likely reason is that the majority of haemocytes in the embryo are undergoing more collisions than our sample of colliding cells, which was selected to have only one collision during a 6-minute period.
To examine the influence of the colliding cell in single collisions, we measured the acceleration of each cell away from its target neighbour (Fig. 1C,D) (Dunn and Paddock, 1982; Paddock and Dunn, 1986). This acceleration only proved to be significant at time t, so the rest of the data were discarded and only the 1-minute interval surrounding the collision was used for constructing the model.

Fig. 2C,D explains how the three parameters of the collision model were estimated from the sample data of velocity pairs. The new estimate of ϕ (persistence) was reduced by 30% compared with the free model, indicating that the cell tends to ‘forget’ its initial direction of travel after a collision. The estimate of ψ (collision sensitivity) was 1.25, comparable with the mean velocity, indicating that the position of the other cell is a significant factor. The estimate ofσ was not very different from that of freely moving cells.
Colliding and non-colliding haemocyte behaviour predicts the dispersal pattern
We next used the two models for simulating the behaviour of cells within a two-dimensional space that mimics the shape and dimensions of the ventral surface of the embryo. A trial simulation with cells starting from random positions gave a mean speed of 1.96±0.24 μm min–1, which was close to the measured speeds for freely moving haemocytes and those from the collision sample (2.03±1.4 μm min–1). However, for the reason mentioned earlier, this speed was faster than the mean speed of haemocytes in the embryo and the emerging pattern was more chaotic than in reality. To avoid the complexities of attempting to analyse multiple cell collisions, we modified our collision model by reducing the noise (σ) to match the average speed in the embryo. When the trial simulation was rerun this change proved to be crucial and the simulated cells quickly settled into a three-line pattern characteristic of haemocytes in the embryo (supplementary material Movie 6).
To mimic the actual haemocyte dispersal process more closely, we confined the movement of simulated cells to a region within 4 μm of the midline for 40 minutes before allowing them to disperse (Fig. 3A; supplementary material Movie 7; see Materials and methods for more details). This led to further unexpected complexities that bore a striking resemblance to real haemocyte dispersal. The simulated cells left at similar 90° angles from the midline along ‘exit points’ in a segmented pattern in a manner that resembles living haemocytes (Fig. 3B,C) (Wood et al., 2006). Real haemocytes were observed to undergo a significant increase in speed and directionality during the lateral migration phase (Wood et al., 2006), which was not significantly different in the simulation (lateral speed of 2.4±0.18 μm min–1 in reality and 2.6±0.37 μm min–1 in simulations, mean ± s.d.; P>0.05, df=28, unpaired t-test). Subsequent to this lateral migration, both simulated and real haemocytes also showed a progressive decrease in mean speed over time as cells became more constrained by their neighbours (supplementary material Fig. S1E).

Simulated haemocyte dispersal recapitulates reality. (A) Haemocyte dispersal was simulated within a space of approximate geometry to real embryos. Cells were run down the midline for a period of 40 minutes before being allowed to freely disperse, when they rapidly developed a stable three-line pattern. (B) Real and simulated cells were tracked during the dispersal process. The insets highlight the repeating lateral movements (arrows) that emerged in both real and simulated cells. Scale bar: 20 μm. (C) Quantification of angles off the midline as cells migrate laterally revealed no significant difference (n.s.) between real and simulated cells (83±25° versus 87±31°, respectively; P>0.6, df=45, unpaired t-test). (D) A time-lapse movie (supplementary material Movie 5) was thresholded and flattened with a mean intensity to reveal the average spacing of haemocytes. (E) Flattening of the same movie with a maximum intensity revealed that haemocytes covered the entire surface of the embryo. (F) Domain maps from simulations were generated in the same way as from real cells using halos to approximate the actin region. (G) The domain map in D was analysed by contour plotting to reveal the peaks of the haemocyte domains. (H) The distance between the haemocyte domains was ∼34 μm. The asterisk indicates a breakdown in the haemocyte domain pattern, which was analysed further in supplementary material Movie 10.
Simulated haemocyte dispersal recapitulates reality. (A) Haemocyte dispersal was simulated within a space of approximate geometry to real embryos. Cells were run down the midline for a period of 40 minutes before being allowed to freely disperse, when they rapidly developed a stable three-line pattern. (B) Real and simulated cells were tracked during the dispersal process. The insets highlight the repeating lateral movements (arrows) that emerged in both real and simulated cells. Scale bar: 20 μm. (C) Quantification of angles off the midline as cells migrate laterally revealed no significant difference (n.s.) between real and simulated cells (83±25° versus 87±31°, respectively; P>0.6, df=45, unpaired t-test). (D) A time-lapse movie (supplementary material Movie 5) was thresholded and flattened with a mean intensity to reveal the average spacing of haemocytes. (E) Flattening of the same movie with a maximum intensity revealed that haemocytes covered the entire surface of the embryo. (F) Domain maps from simulations were generated in the same way as from real cells using halos to approximate the actin region. (G) The domain map in D was analysed by contour plotting to reveal the peaks of the haemocyte domains. (H) The distance between the haemocyte domains was ∼34 μm. The asterisk indicates a breakdown in the haemocyte domain pattern, which was analysed further in supplementary material Movie 10.
Interestingly, taking a different modelling approach, which assumes that haemocyte contact inhibition involves simple volume exclusion between cells, failed to recapitulate the details and timing of the dispersal pattern and resulted in a reduction of haemocyte patrolling behaviour (supplementary material Movie 8, Mathematica Simulation 2). This reveals that the repulsive dynamics between colliding cells plays a crucial role in their stereotyped migration.
Simulations reveal a geometrically close-packed haemocyte dispersal pattern
These data suggest that ‘three-lined’ might not be the most accurate description of the pattern, as the model predicts that haemocyte spacing is actually due to the geometry of close packing in a confined space. A consequence of this is that the mean distance between neighbouring cells along any of the three lines is the same as that between the lines. To directly test this, we developed a method for visualising the mean cell positions throughout the duration of their movement. We generated density maps of the frequency of cell occupancy by temporally averaging time-lapse movies of haemocytes. The pattern that emerged showed clearly defined residence domains, even though the whole of the available space was occupied by haemocytes at some time during the movie (Fig. 3D,E).
The domain maps of real and simulated cells were remarkably similar (Fig. 3D,F) (unlike the volume exclusion model, supplementary material Fig. S2), and, when cell tracks were overlaid onto the map, both simulated and real cells appeared to hop between domains (supplementary material Movie 9). Slightly more domain hopping occurred in reality as haemocytes occasionally dropped off the ventral surface laterally towards the plane below, which opened up a domain allowing cells to shift, thus creating a dynamic, yet stable, structure. When real cells jumped between domains they showed a sudden increase in speed, which was similar regardless of whether cells were moving laterally or vertically (2.4±0.18 μm min–1 or 2.2±0.25 μm min–1, respectively, mean ± s.d.; P>0.05, df=19, unpaired t-test). Therefore, the increased lateral movement of haemocytes reported previously (Wood et al., 2006) is comparable to a domain hop as cells move into free space.
In order to quantify the spacing of the haemocyte domains, a contour plot was taken of the domain map and the distance between contour peaks measured. Interestingly, the domains showed an even spacing of ∼34 μm (Fig. 3G,H), which was consistent with a contact inhibition distance of ∼30 μm. However, occasionally, the domain spacing was observed to break down, suggesting that acquisition of the pattern might be stochastic (Fig. 3H). To observe the reason for this aberrant domain, the time-lapse series and cell tracks were overlaid onto the domain map, which allowed us to visualise the offending cell. This analysis revealed that the aberrant domain was generated by a single cell that became accidentally stuck between the domains occupied by two other haemocytes (supplementary material Movie 10). A comparison of domain maps from multiple embryos and simulations also revealed the random nature of the final pattern (supplementary material Fig. S2).
Examination of crosstalk with extrinsic cues
In order to further examine how well the model recapitulates reality we measured the dispersal of cells by computing the nearest neighbour distribution (the distance between each cell and its closest neighbour). In the model, the median nearest neighbour distance was slightly greater and the variance reduced compared with real embryos (25.08±1.45 μm versus 20.42±7.84 μm; P<0.001, df=219, Mann-Whitney test) (supplementary material Fig. S3A). This is unsurprising because in simulations cells automatically repel whenever they are within the defined contact distance, whereas in reality haemocytes are polarised and appear to only respond upon lamellar overlap; therefore, in real embryos, haemocytes can often be found closer than their defined contact distance if, for example, lamellae of possible colliding cells missed each other or cells were positioned back-to-back (this can be observed in supplementary material Movie 10).
Despite this increase in nearest neighbour variance in reality, the domain pattern closely mimicked simulations, and at times it even appeared that the domains were slightly more structured than simulations suggested. We therefore investigated obvious external factors that might be contributing to the stability of the pattern. As haemocytes are known to be major producers of extracellular matrix in the embryo (Yasothornsrikul et al., 1997), we first examined whether cells were laying down tracks of matrix as they dispersed, which might then behave as a haptotactic guidance cue for haemocytes, thus reinforcing the domain pattern. However, examination of a fly line expressing a GFP-Collagen IV fusion protein (Viking-GFP enhancer trap) revealed no obvious domain-like pattern to the matrix, suggesting that this hypothesis was unlikely (supplementary material Fig. S3B).
We next correlated cellular tracks to embryonic segments to determine whether, analogous to neural crest somite confinement (Gammill and Roffers-Agarwal, 2010), cells were unable to cross segment boundaries. When we compared haemocyte dispersal tracks to segments we observed no obvious restriction in movement (supplementary material Fig. S3C). When we compared the percentage of tracks per embryo that crossed segments in reality to simulated tracks that crossed estimated segmental boundaries, no significant difference was observed (supplementary material Fig. S3C). Finally, we examined haemocyte domain dynamics in relation to segments. Computing a walking average domain map over the duration of the dispersal process revealed that domains were not static structures; they regularly disappeared and reappeared as space for haemocyte movement became available (supplementary material Movie 11), and also often crossed segment boundaries (supplementary material Movie 12). However, as we could not precisely correlate domains with segments and parasegments, we could not rule out the influence of more subtle segmentation effects. For example, the segmented epithelial grooves (Larsen et al., 2003) could create topography in the haemocoel that subtly biases haemocyte motility.
As we could not directly identify extrinsic factors modulating haemocyte dispersal, we took a closer look at the domain pattern in an attempt to infer their existence. It is clear from the dispersal timecourse that there must be some initial cue(s) that brings cells down the ventral midline and we therefore examined whether there was anything anomalous about its haemocyte domain structure. In real embryos, we first compared the distance between domains residing on the midline to domain distances within lateral ‘lines’ (supplementary material Fig. S3D). Although there was no difference in the spacing of domains between midline and lateral lines, we noticed a significant difference in the variance; in real embryos, the variance in the midline domain spacing began low and increased over time, whereas the variance in lateral domains was constant (supplementary material Fig. S3E). By contrast, in simulated embryos, midline domains showed the reverse; variance began high in the midline and subsequently decreased as the pattern stabilised. Furthermore, there were subtle differences in the spacing of domains, as real embryos showed an initial increased spacing, which decreased over time until it closely matched simulations (supplementary material Fig. S3D). These data suggest that there might be some midline effects that subtly modify the pattern. The PDGF/VEGF-like ligand Pvf2 is expressed along the ventral midline in a segmental fashion, and it has been speculated that cells might specifically cluster around these points (Wood et al., 2006). If this is the case, then the increase in the variance of domain spacing over time might be the result of Pvf2 expression decreasing along the midline over the timecourse of the dispersal process (Wood et al., 2006). It is also possible that these foci of Pvf2 act as anchor points in midline domains, which we hypothesise would have a knock-on effect that modifies lateral domains and helps to stabilise the overall embryonic pattern.
Simulations predict that cell number is critical for the haemocyte dispersal pattern
Our simulations suggest that the acquisition and stability of the pattern are strongly dependent on collision parameters (see supplementary materialMathematica Simulation 1) and governed by a number of variables, such as embryo size, collision distance and cell number. However, it was a challenge to individually examine many of these variables within our system in vivo with the exception of cell number, which simulations suggested would severely affect the migratory pattern (supplementary material Movie 13). Overexpression of Cyclin A specifically in haemocytes led to a ∼50% decrease in cell number [as observed in other cell types (Keck et al., 2007)] without affecting their basic migratory properties. At stage 14 of development the cells still migrated down the ventral midline, subsequently dispersed, and displayed normal contact inhibition (Fig. 4A; supplementary material Movies 14, 15). Furthermore, the collision distance, which is a critical parameter in the model, in Cyclin A-expressing cells (31±4.7 μm) was not significantly different to that of wild-type cells (P>0.9, df=26, unpaired t-test). However, lateral movement off the midline failed to show the segmental periodicity and a three-line pattern failed to form (Fig. 4A; supplementary material Movie 14). Furthermore, the migratory domain map, when cell numbers were reduced in both reality and simulations, revealed a complete failure to acquire the close-packed geometry (Fig. 4B,C; supplementary material Movie 14).

Reduction of cell number prevents pattern development. (A) Example embryo containing haemocytes overexpressing Cyclin A, along with a red nuclear marker and GFP-labelled microtubules. Cells were tracked for 2 hours as they developmentally dispersed. Right-hand panel shows cell tracks over the duration of the time-lapse movie. (B) Contour plot of a domain map of Cyclin A-expressing haemocytes containing labelled actin (generated from supplementary material Movie 14). (C) Contour plot of a domain map of a simulation containing half the number of cells as found in wild type. Scale bars: 10 μm.
Reduction of cell number prevents pattern development. (A) Example embryo containing haemocytes overexpressing Cyclin A, along with a red nuclear marker and GFP-labelled microtubules. Cells were tracked for 2 hours as they developmentally dispersed. Right-hand panel shows cell tracks over the duration of the time-lapse movie. (B) Contour plot of a domain map of Cyclin A-expressing haemocytes containing labelled actin (generated from supplementary material Movie 14). (C) Contour plot of a domain map of a simulation containing half the number of cells as found in wild type. Scale bars: 10 μm.
Conclusion
Our aim was to model the dispersal of haemocytes in the simplest possible terms taking into account their contact inhibitory dynamics. Considering only two kinematic regimes – freely moving and singly colliding cells – our estimated parameters recapitulate the migratory pattern of cells within the embryo with surprising accuracy. This result has broader implications for morphological development, suggesting that Michael Abercrombie’s ‘social behaviour’ of cells can be a significant driving force for embryonic pattern formation.
Acknowledgements
We thank Marc Dionne, Roberto Mayor, Tanya Shaw and Eric Theveneau for helpful discussions.
Funding
This work is supported by a Biotechnology and Biological Research Council (BBSRC) grant [BB/F020635/1], the Medical Research Council (MRC), and the British Heart Foundation Centre of Research Excellence. Deposited in PMC for release after 6 months.